EC Lecture 3 Constrained Optimization
目标函数 vs. 约束 Objective vs. Constraint
示例问题:
- 目标函数 Objective function:需要被最小化/最大化的函数(这里是最小化)。
- 约束 Constraint:可行解必须满足的条件(这里要求
在受约束优化中比较解 Comparing solutions in constrained optimization
例子(第 0 代/若干候选点):
| 0 | 0 | -1.5 |
| 1 | -1 | -0.5 |
| 1.5 | -0.75 | 0 |
| 2 | 0 | 0.5 |
目标与约束的区别 Objectives and constraints
- 目标 Objective:越小越好(针对最小化问题;若是最大化,则需做相应处理)。
- 约束 Constraint:只有 可行 Feasible / 不可行 Infeasible 两类
- 可行解通常被视为"同一层级"(都满足约束)。
- 不可行解之间仍可比较"好坏"(取决于违反程度)。
受约束优化的解排序 Rank solutions
- 可行解 Feasible solutions 优于 不可行解 Infeasible solutions
- 两个可行解:目标函数值 Objective value 更优者更好(最小化时更小更好)
- 两个不可行解:约束违反 Constraint violation 更小者更好
处理约束:违反程度与惩罚函数 Handling Constraints
描述约束违反 Describe constraint violation
约束违反之和 Sum of the constraint violation
- Case 1:总重量
vs. 要求 (违反 ); 总体积 vs. 要求 (违反 ) - Case 2:某些约束可能有 优先级 Priority
加权约束违反之和 Weighted sum of the constraint violation
- 当约束有优先级或量纲不同,使用 加权和 Weighted sum 来综合违反程度。
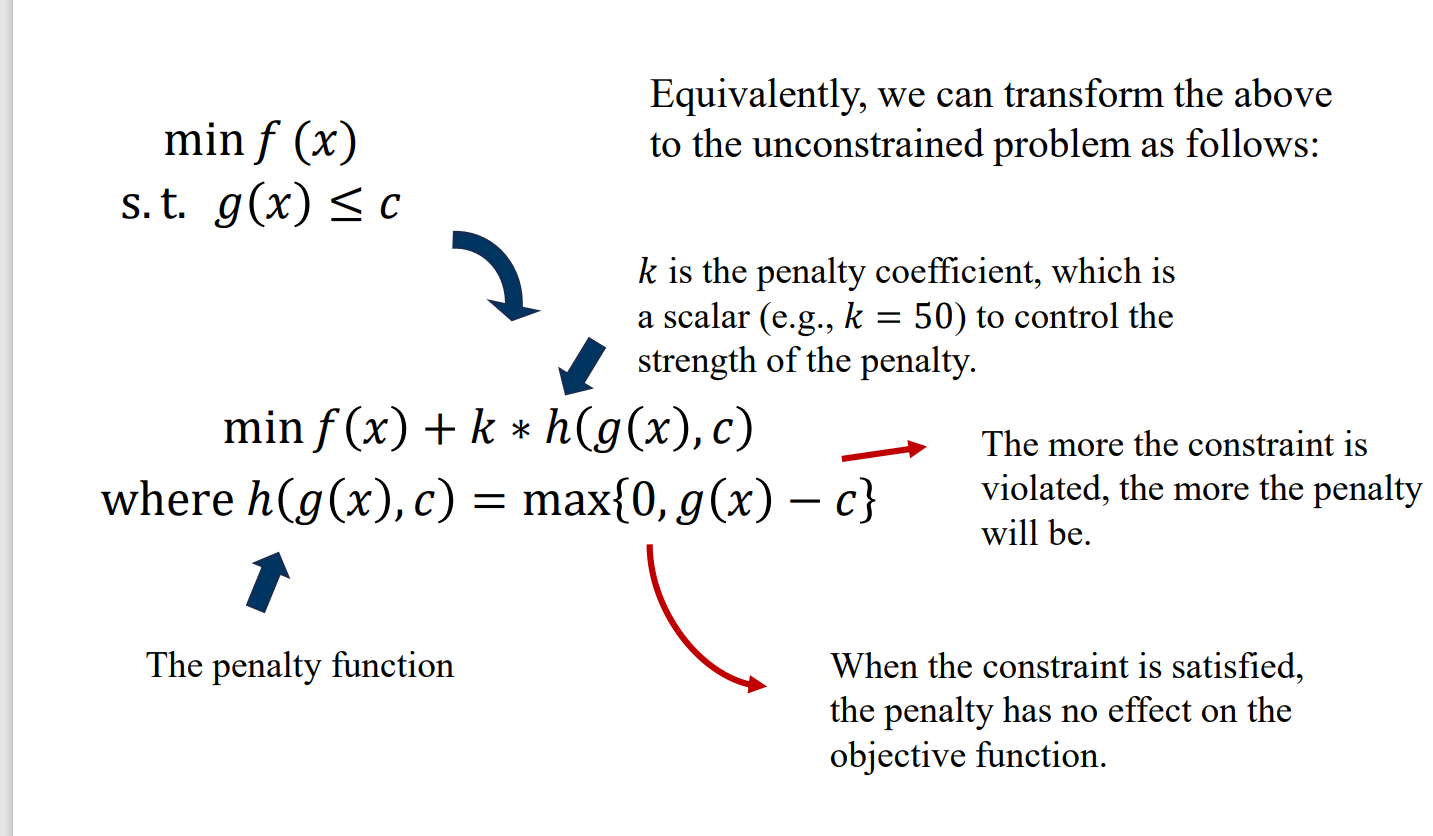
惩罚函数法 Penalty function method
将受约束问题:
转化为带惩罚项的无约束问题(有限惩罚系数下通常是近似处理,而不是严格等价):
其中 惩罚函数 Penalty function:
是 惩罚系数 Penalty coefficient(标量 scalar,例如 - 约束违反越多,惩罚项越大。
- 当满足约束时(
,对目标函数无影响。
如何确定惩罚系数
一种 经验方法 Empirical method:
- Step 1:估计一个可容忍的 预期可接受违反 Intended acceptable violation
- Step 2:估计一个期望获得的 期望最优目标值 Expected optimal objective value
- Step 3:选择
,使得 的 倍:
惩罚函数法示例 Penalty function example
给定:
若取
多个约束 Multiple constraints
原问题:
Step 1:统一约束方向 Unify constraints(例如全转成
Step 2:用惩罚函数法并入目标 Integrate constraints:
Step 3:分别确定
如果是最大化 What if maximization?
只需对目标取负,把 最大化 Maximization 转成 最小化 Minimization,其余处理同前。
惩罚函数法是否遵循排序原则?
排序原则(回顾):可行解优于不可行解 → 两个可行解比目标值 → 两个不可行解比违反程度。
结论:如果惩罚系数
例子:背包问题 Knapsack Problem
问题设置 Problem setup
五个物品(价值 value / 重量 weight / 体积 volume):
| 物品 | 价值 | 重量 | 体积 |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 |
背包容量 Capacity:
决策变量 Decision variable:
最大化总价值:
约束:
Step 1:转为最小化 Convert to minimization
Step 2:统一约束方向 Unify constraints
本例两个约束已经是
Step 3:惩罚函数并入目标 Integrate constraints
给定(示例选择):
则:
多目标优化 Multiobjective Optimization
问题定义 Problem definition
是 决策变量 decision variables, 是维度 是 决策空间 decision space 个 目标 objectives 通常彼此冲突
示例:汽车设计 Example: automobile design
能源消耗(每百英里)应尽可能低,制造成本应尽可能低。两者相互冲突:低能耗依赖于更先进的动力单元设计,这会增加制造费用。
支配 Dominance
在任何目标上都不比 差 至少在一个目标上严格优于
对于任意两个解
支配图解 Illustration
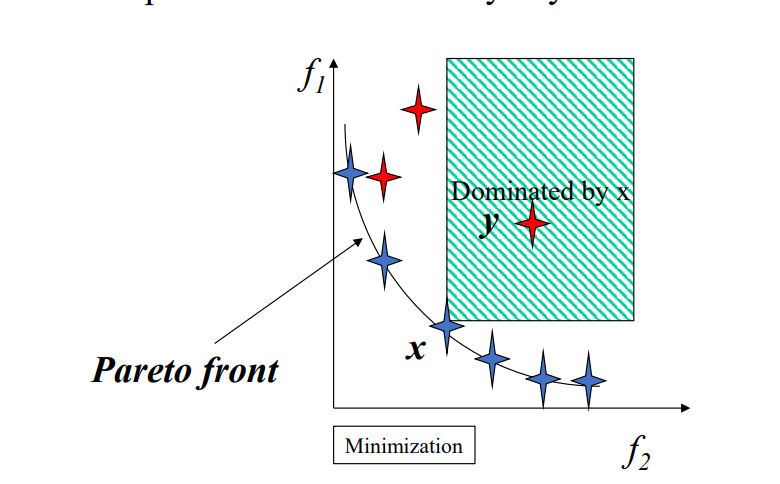
- B 支配 A
- B 和 C 不可比较,A 和 C 也是如此
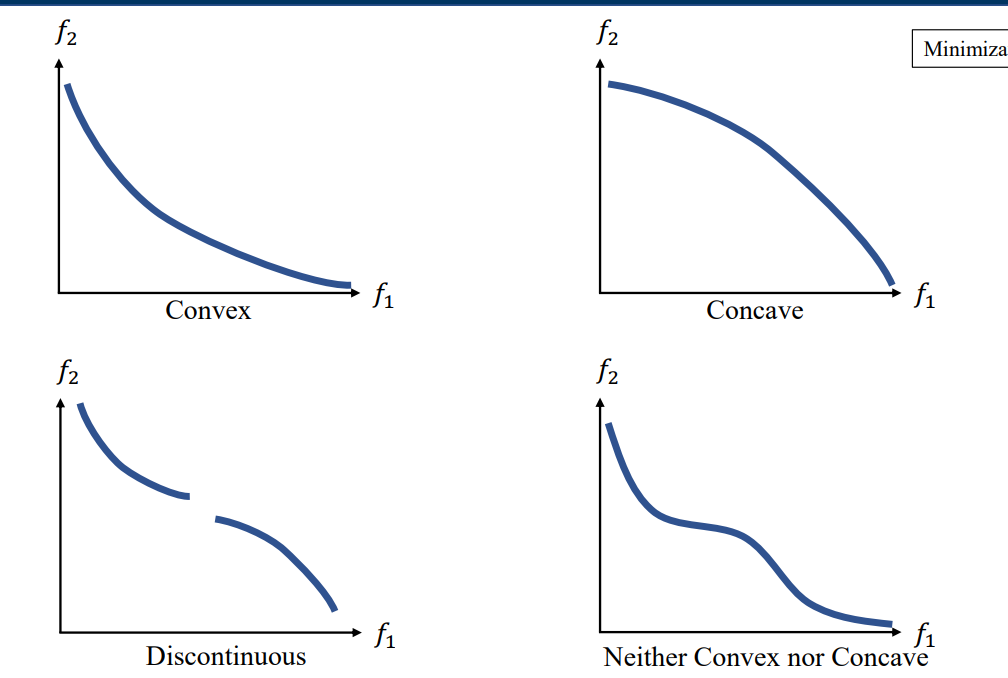
帕累托前沿 Pareto Front
帕累托前沿 PF:帕累托最优解在目标空间中的函数值集合。
帕累托集 PS:所有帕累托最优解的集合(决策空间的子集)。
帕累托最优解:不被任何其他解支配的解。一个理性的决策者不会选择非帕累托最优解。
帕累托前沿的不同形状:凸、凹、不连续、既非凸也非凹。
多目标进化算法 MOEAs
基于种群的迭代搜索 Population-based iterative search
简单 EA 的一次迭代:
- 第
代种群 → 选择 Selection → 父代集合 - 交叉 Crossover / 变异 Mutation
- 第
MOEA 的目标:生成有限数量的均匀分布的帕累托最优解,逼近 PF。
MOEA 分类
| 类型 | 代表算法 | 思路 |
|---|---|---|
| 基于分解 Decomposition | MOEA/D | 将 MOP 分解为多个单目标子问题,协同求解 |
| 基于支配 Dominance | NSGA-II | 基于帕累托支配关系和目标空间距离迭代选择 |
| 基于指标 Indicator | IBEA | 用超体积等指标评估解集质量,迭代选择 |
MOEA/D 的优势
- 小种群下具有良好的分布性和高优化质量
- 由于仿真成本,种群规模通常受限;分解思想有助于获得更均匀的最终解分布
- 在许多小种群场景下,MOEA/D 可能比 NSGA-II 更容易保持较好的分布性,但具体性能仍取决于问题和参数设置
MOEA/D:分解 + 协同
分解 Decomposition:将逼近 PF 的任务分解为
协同 Collaboration:
每个子问题的输入:分解函数
分解方法 Decomposition methods
加权和法 Weighted sum approach
适用于凸 PF。
切比雪夫法 Tchebycheff approach
其中
邻域协同 Neighborhood collaboration
- 如果两个子问题的权重向量相近,则互为邻居
- 相邻子问题目标函数相似,最优解也大概率相似
交叉示例:子问题当前最优解 [x1,...,x9] 与邻居最优解 [y1,...,y9] 交叉 → [x1,x2,x3,y4,y5,y6,y7,x8,x9]
MOEA/D 整体流程
每一代,每个子问题执行:
- 交配池选择:获取邻居的当前解(协同)
- 繁殖:交叉 + 变异生成新解
- 替换:若新解更优则替换旧解,并传递给部分邻居