4 Discrete Time Systems
桃之夭夭,其叶蓁蓁。之子于归,宜其家人。

章节目录
- 章节目录
- 4-2 DT 系统的分类
- 4-3 冲激响应与阶跃响应 Impulse and Step Responses
- 4-4 LTI 离散系统的时域特性
- 4-5 LTI 系统互联
- 4-6 有限维 LTI 离散系统 Finite-dimensional LTI-DT System
- 4-7 LTI-DT 系统分类
- 4-8 LTI-DT 系统的频域表示
- 4-9 相位延迟和群延迟 Phase Delay and Group Delay
4-2 DT 系统的分类
我们可以通过系统的性质,将 DT 系统简单分为以下几类:
- Linear System 线性系统
- Shift-invariant System 时不变系统
- Causal System 因果系统
- Stable System 稳定系统
- Passive and Lossless System 无源系统与无损系统
在本章节接下来的定义中,我们默认:
,即
4-2-1 线性系统 Linear System
定义
对于一个系统
,即对于所有可能的常数
上述定义展示了线性系统的两者性质,分别为:
- 齐次性 / 比例性
- 可加性
4-2-2 时不变系统 Shift-invariant System
定义
对于一个系统
,则我们称这个系统为时不变系统。
4-2-3 因果系统 Causal System
1. 定义
第
即当前输出只能由现在和过去的输入决定,不能受到未来输入的影响。
NOTE
在某些教材中,因果系统也被称为物理可实现系统 Physical Practical System。
这个名字应该比因果好理解一点,因果性这个翻译还是太哲学了。
2. 等价表述
对于一个 输入和输出具有相同采样率的 因果系统,如果两个输入信号满足:
则其对应输出也必然满足
。即如果两个输入在某个时刻之前完全一样,那么在那个时刻之前,输出也必须完全一样。
TIP
强调输入和输出是相同采样率的原因 因为这里默认输入序列和输出序列都能用同一个离散索引
比如:
- 输入采样率是
- 输出采样率是
那输入和输出的“同一个
4-2-4 稳定系统 Stable System
1. 定义
如果且仅如果一个系统
2. 性质
对于一个 BIBO 稳定系统,
即,只要输入有界,就能找到某个有限的输出界。
TIP
对性质的理解
第一,输入只要求“幅值不超过某个有限数”,不要求能量有限。 比如
它不是有限能量信号,但它是有界信号。
第二,输出的界
4-2-5 无源系统与无损系统 Passive and Lossless System
1. 无源系统
如果对每一个有限能量输入序列
,那么这个离散时间系统称为无源系统 Passive System。
2. 无损系统
如果上式对每一个输入都以等号成立,即
那么该离散时间系统称为无损系统 Lossless System。
TIP
这里讨论的是能量,不是幅值。
讨论这两个性质时,只需要按照定义考虑输入和输出的能量即可。
3. 工程意义
无源性和无损性这两个性质,对于设计那些对滤波器系数变化不敏感的离散时间系统来说是非常重要的。
在数字滤波器实现中,滤波器系数通常会有:
- 量化误差
- 舍入误差
- 有限字长误差
- 硬件实现偏差
如果一个系统具有无源性或无损性,那么它通常在数值实现上更“稳健”,不容易因为系数稍微变化就导致:
- 输出能量异常增大
- 数值发散
- 对误差极其敏感
所以这类性质在数字滤波器、格型滤波器、正交变换结构等设计里很重要。
4-3 冲激响应与阶跃响应 Impulse and Step Responses
4-3-1 定义
数字系统对单位样本序列
离散时间系统对单位阶跃序列
一个线性时不变数字系统 Linear Time-Invariant Digital System, LTI system 在时域中可以被其冲激响应或其阶跃响应完全表征。
4-4 LTI 离散系统的时域特性
4-4-1 离散信号通过 LTI 离散系统:卷积和
通过前面的学习,我们已经知道一个离散序列
而对于一个 LTI 系统,对每个单独的加权冲激函数,将
又因为其遵循线性性的可加性,因此可以得到:
我们将
通常简写为
IMPORTANT
通过以上的数学推导,我们证明了一个信号通过 LTI 系统的输出信号即为原始信号与该系统冲激响应的卷积和。
卷积的具体计算在这里不讨论,相信大伙都会了
4-4-2 卷积和的运算性质
1. 交换律 Commutative Property
2. 结合律 Associative Property
3. 分配律 Distributive Property
4-4-3 LTI 系统中的稳定性与因果性
1. 稳定性
一个 LTI 系统具有 BIBO 稳定性,当且仅当它的冲激响应绝对可和,即
2. 因果性
一个 LTI 系统具有因果性,当且仅当它的冲激响应在负时间全部为 0 ,即
4-5 LTI 系统互联
4-5-1 串联 Cascade Connection
假设两系统串联连接,过程可表示为:
其响应为:
IMPORTANT
可以得到串联系统的冲激响应表达式
4-5-2 并联 Parallel Connection
假设两系统并联连接,过程可表示为:
带入,可得总输出为
IMPORTANT
可以得到并联系统的冲激响应表达式
4-6 有限维 LTI 离散系统 Finite-dimensional LTI-DT System
4-6-1 有限维 LTI 离散系统
TIP
如果你学过 Markov 链,应该很容易理解这一节。虽然一个是描述概率和状态,一个是描述输入和输出,但它们都可以把“当前时刻的未来演化”写成只依赖“当前状态”的形式。
1. 定义
先看一般的 LTI 卷积:
不难发现,如果我们要计算
而对于有限维 LTI 离散系统,我们不需要无限个过去样本。
即当前输出以及若干个过去输出,与当前输入以及若干个过去输入之间满足一个有限项关系。
IMPORTANT
用系数线性差分方程描述有限维 LTI 离散系统:
系统阶数 System Order:
2. 数学处理
我们假设该系统一定因果,且
这个式子只用了:
- 当前输入
- 过去输入
- 过去输出
没有出现未来项,比如
CAUTION
以下内容在 PPT 中标注为自学 Self-Study
我的意思是,我也没学会
4-6-2 * 初始状态和响应计算
1. 总解
系统输出可以写成
其中:
:总解(total solution) :补充解(complementary solution),也常称为齐次解 :特解(particular solution)
含义说明
是在输入取零时,即 对应差分方程的解,因此反映的是系统自身的自然演化行为。
是在输入 时,由外部输入激励产生的那部分响应。
因此,总输出可以理解为:
系统内部固有响应 + 外部输入引起的响应
2. 零输入响应与零状态响应
系统输出也可以写成
其中:
:零输入响应(zero-input response) :零状态响应(zero-state response)
零输入响应(Zero-Input Response)
零输入响应是通过令输入为零得到的,即
但此时系统的初始条件不一定为零。
因此,零输入响应描述的是:
即使没有外部输入,系统由于初始储能或初始状态而产生的输出。
零状态响应(Zero-State Response)
零状态响应是指在给定输入
也就是说,系统初始时没有任何内部存储能量或历史状态,输出完全由输入激发产生。
因此,零状态响应描述的是:
在零初始条件下,外部输入单独引起的输出。
3. 两种分解的关系
从数学求解角度,输出可写为
从系统响应来源角度,输出也可写为
这两种分解的关注点不同:
- 补充解 / 特解:强调差分方程的数学结构
- 零输入响应 / 零状态响应:强调系统输出的物理来源
在常系数线性系统中,通常可以将它们对应理解为:
但严格来说,它们的出发点并不完全相同。
4-7 LTI-DT 系统分类
4-7-1 基于序列长度
如果系统的冲激响应
是有限长度的,则称该系统为有限冲激响应系统 Finite Impulse Response, FIR system。 如果系统的冲激响应
是无限长度的,则称该系统为无限冲激响应系统 Infinite Impulse Response, IIR system 。
4-7-2 基于输出计算方式
如果系统的输出只需要由当前输入和过去输入来计算,则称该系统为非递归系统 Nonrecursive System。
如果系统的输出计算除了依赖输入之外,还依赖于过去输出,则称该系统为递归系统 Recursive System。
4-8 LTI-DT 系统的频域表示
4-8-1 频率响应 Frequency Response
1. 定义
从前面,我们知道系统的时域表达式:
如果想从频域的角度分析 LTI 系统,那么只需要分析 系统对每个频率的响应 即可。
因此,我们令
,带入卷积式得到:
IMPORTANT
我们定义:
这里的
则原式可写为
其中
定义:当特征函数作用于一个LTI系统时,其输出信号与输入信号保持相同的函数形式,仅在幅度和相位上发生一个常数倍的变化
系统的频率响应也可以通过对
。
2. 性质与意义
- 幅度和相位
通过观察定义式
如果对频率响应函数做极坐标分解,我们可以发现:
IMPORTANT
我们将
相应地,
也就是说:
系统不会改变输入复指数的频率,只会改变它的幅度和相位。
或者说,当一个频率分量通过 LTI-DT 系统时,其频率没有发生任何变化,对每个频率分量独立作用。
- 周期性
显然,频率响应函数以
相似地,频率响应也通常只看一个主值区间,如
3. 增益函数 Gain Function 和 dB 表示
我们定义:
- 若
- 若
- 若
TIP
通常,对于比值取对数,我们对功率比有10的系数,幅度比则有20的系数。
它们的2倍差值来自于功率其实是幅度的平方项,在取对数后平方被移到了系数的位置。
这里增益函数因为是对幅度比取对数系数20。
如果是功率比才常写成
NOTE
另一种表示增益函数的公式:
这里表示:
用某个参考频率
其中 dBC 常理解为“相对于载波 Carrier”或某个参考分量的分贝值,这在通信和频谱分析里特别常见。
4. 实系统的对称性结论
| 类别 | 结论 | 数学表达 |
|---|---|---|
| 条件 | 若系统的冲激响应 | |
| 幅度响应 | 幅度是偶函数 | |
| 实部 | 实部是偶函数 | |
| 相位响应 | 相位是奇函数 | |
| 虚部 | 虚部是奇函数 | |
| 根本原因 | 实序列的 DTFT 满足共轭对称 |
4-8-2 通过卷积定理得到频率响应
卷积定理:
通过卷积定理,我们可以轻松得到频率响应,如:
这一解法与 CT 信号类似。
4-8-3 FIR 和 IIR 的频率响应
1. FIR 系统响应
由于 FIR 系统的序列长度有限,因此其频率响应可以被写成一个有限项求和:
FIR 的频率响应本质上是一个关于
2. IIR 系统响应
IIR 系统频率响应可以被写作:
因为 IIR 系统通常由差分方程描述:
对它取 DTFT,就会得到:
于是:
所以:
- FIR:频率响应是有限和
- IIR:频率响应通常是一个比值,分子分母是关于
的多项式
4-8-5 稳态和瞬态响应 Steady-state and Transient Response
对于一个离散时间周期信号
其中:
是基波角频率 是第 个谐波角频率 是第 个频率分量对应的傅里叶级数系数
1. LTI 系统对周期输入的响应
对于冲激响应为
将周期输入的傅里叶级数展开代入上式:
交换求和次序,可得:
由频率响应定义:
因此输出可写成:
NOTE
这说明:对于输入信号
LTI 系统的输出仍然是同频率的复指数信号,只是被乘上了一个复常数
也就是说,系统对每个谐波分量只做两件事:
- 改变幅度
- 改变相位
而不会改变该分量的频率本身。
2. 稳态响应 Steady-state Response
对于周期输入,系统输出中由各个频率分量稳定叠加而成的这一部分,通常称为稳态响应 Steady-state Response。
其表达式为:
即,
周期输入经过 LTI 系统后,输出仍然由同一组谐波频率构成,只是每个谐波的幅度和相位都被系统频率响应修改了。
3. 瞬态响应 Transient Response
定义:
它称为系统的瞬态频率响应 Transient Frequency Response。
作为对比,普通频率响应为:
而瞬态频率响应只累加到
在时刻
之前,系统冲激响应已经“积累”到的那一部分频域作用。
也就是说:
描述系统完整的长期频域特性 描述系统在有限时刻 下尚未完全进入稳态时的频域特性
4-8-7 滤波 Filtering
1. 数字滤波器 Digital Filter
LTI-DT 系统的一个重要应用,是:
- 让某些频率分量通过
- 抑制或阻止另外一些频率分量通过
这样的系统称为数字滤波器 Digital filter。
从频域角度看,滤波器的作用本质上就是:
对不同频率分量给予不同的响应。
如果某个频率处的幅度响应较大,则该频率成分可以较好地通过系统;
如果某个频率处的幅度响应很小,则该频率成分会被显著衰减。
2. 滤波原理
滤波理论的关键基础是 DTFT 的反变换公式:
这个公式表明:
任意离散时间输入信号
都可以表示为无穷多个复指数信号 的线性加权和。
由于复指数信号也可对应理解为正弦/余弦频率分量,因此任意信号都可以从频域上看成许多不同频率成分的叠加。
只要适当设计系统的频率响应,特别是其幅度响应
,就可以对输入中的不同频率成分进行有选择的保留或压制。
例如:
若在某个频率
处有 则该频率分量基本通过
若在某个频率
处有 则该频率分量被强烈衰减甚至滤除
因此,滤波的本质就是:
通过设计系统对不同频率的增益,来实现对频率成分的选择性保留或抑制。
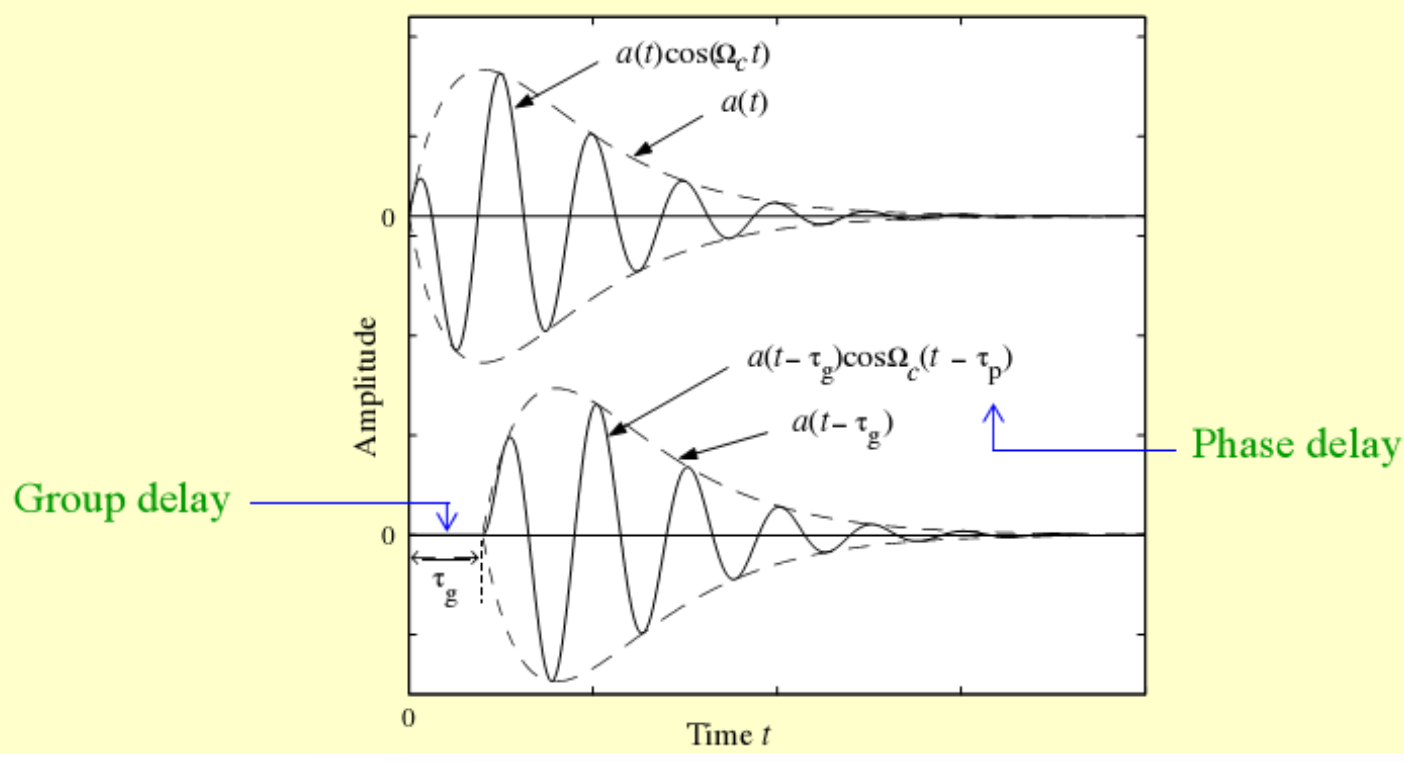
4-9 相位延迟和群延迟 Phase Delay and Group Delay
4-9-1 相位延迟
假设一个单音正弦信号
求其响应信号:
输出信号与输入信号的频率
IMPORTANT
我们定义频率
其意义为:对频率为
4-9-2 群延迟 Group Delay
假设一个调制后的信号:
,如果
当这个窄带信号通过
IMPORTANT
此时我们定义群延迟:
其意义为:频率附近一小段窄带频谱整体移动了多少,也就是包络延迟了多少。
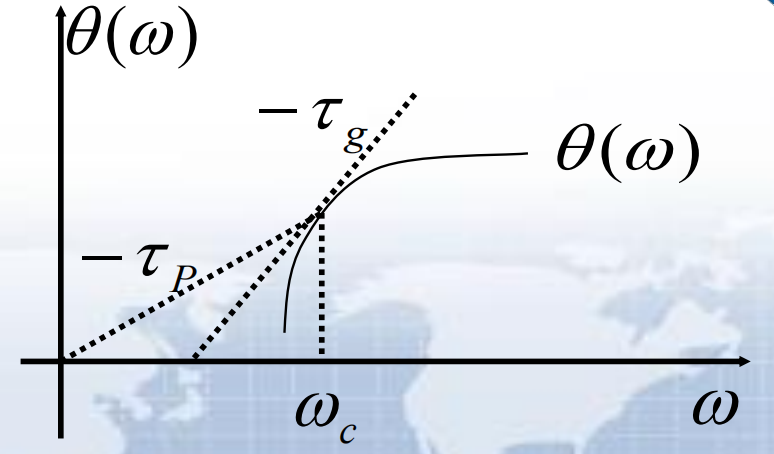
为什么群延迟是相位对频率的导数
因为窄带信号不是一个频率,而是一簇靠近
如果系统相位响应在
那么这簇频率经过系统后:
- 常数项
主要影响整体载波相位; - 斜率项
决定不同频率成分之间的相对错位。
而这些相对错位正好决定包络整体移动多少,所以就得到:
这就是群延迟的来源。
4-9-3 延迟均衡器
当 LTI 系统的群延迟