7 LTI-DT Systems in the Transform Domain
愿你的青春如花般绽放。
章节目录
- 章节目录
- 7-1 基于幅度特性的传递函数分类 Transfer Function Classification Based on Magnitude Characteristics
- 7-2 基于相位特性的传递函数分类 Transfer Function Classification Based on Phase Characteristics
- 7-3 线性相位 FIR 传递函数类型 Types of Linear-Phase FIR Transfer Functions
- 7-4 简单数字滤波器 Simple Digital Filters
7-1 基于幅度特性的传递函数分类 Transfer Function Classification Based on Magnitude Characteristics
7-1-1 传递函数分类 Types of Transfer Functions
第 6 章已经把 LTI-DT 系统写成了传递函数:
只要单位圆落在 ROC 内,频率响应就可以由
因此,数字滤波器可按以下两类频域特性分类:
- 幅度特性 Magnitude Characteristics:由
描述频率成分的通过与抑制; - 相位特性 Phase Characteristics:由
描述各频率分量的相位延迟。
第 6 章中的 FIR / IIR 分类基于冲激响应长度,本章的分类基于频域特性。
7-1-2 理想幅度响应数字滤波器 Digital Filters with Ideal Magnitude Responses
理想数字滤波器 Ideal Digital Filter
理想数字滤波器 Ideal Digital Filter 指幅度响应在通带 Passband 内精确为 1,在阻带 Stopband 内精确为 0,并且过渡带 Transition Band 宽度为 0 的滤波器。
四类基本理想幅度响应如下。
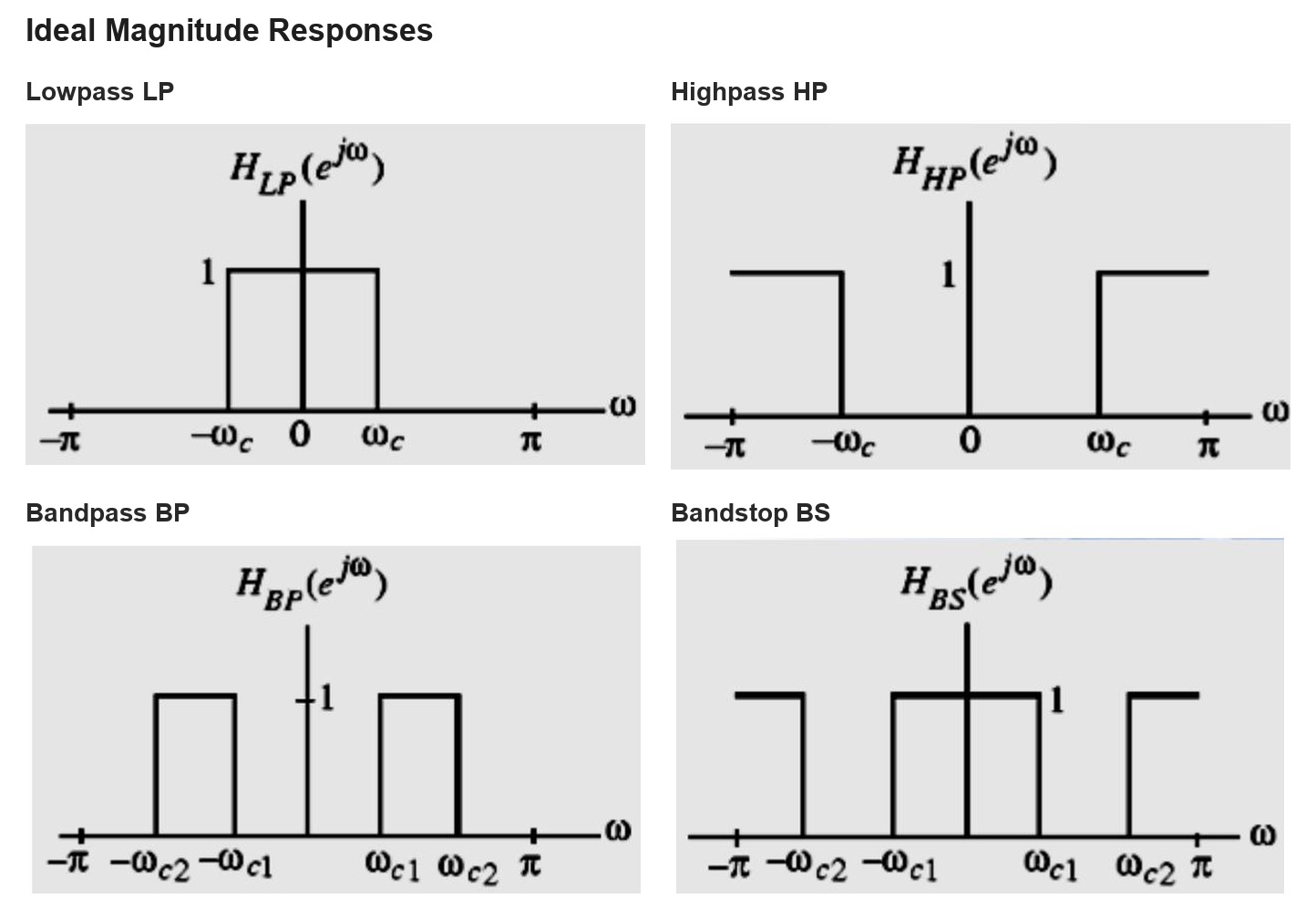
以理想低通为例:
由 IDTFT 可得其冲激响应:
这个结果是无限长的双边序列,且关于
实际滤波器只能逼近理想响应,指标通常写成:
- 通带纹波 Passband Ripple:
; - 阻带纹波 Stopband Ripple:
; - 通带边缘 Passband Edge:
; - 阻带边缘 Stopband Edge:
; - 过渡带宽度 Transition Bandwidth:
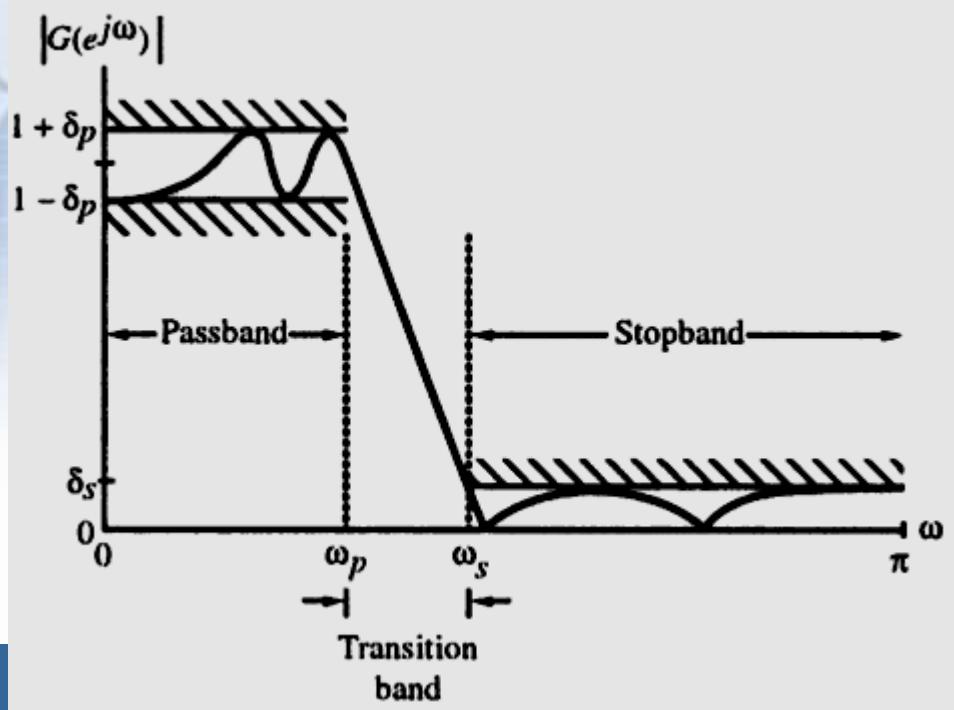
过渡带越窄、纹波越小,滤波器阶数通常越高。
7-1-3 有界实传递函数 Bounded Real Transfer Functions
有界实传递函数 Bounded Real Transfer Function
若稳定因果系统的频率响应满足
则称
由
以及 Parseval 关系可知:
BR 系统不会增加输入信号的总能量。
无损有界实传递函数 Lossless Bounded Real Transfer Function
若稳定因果系统满足
则称
LBR 不改变幅度,只改变相位。全通传递函数是常见的 LBR。
PROBLEM L7-E1
设一阶 IIR 系统
求其成为 BR 系统的条件。
SOLUTION
单位圆上有
分母最小值为
因此 BR 条件为:
其中:
因此该条件应写成
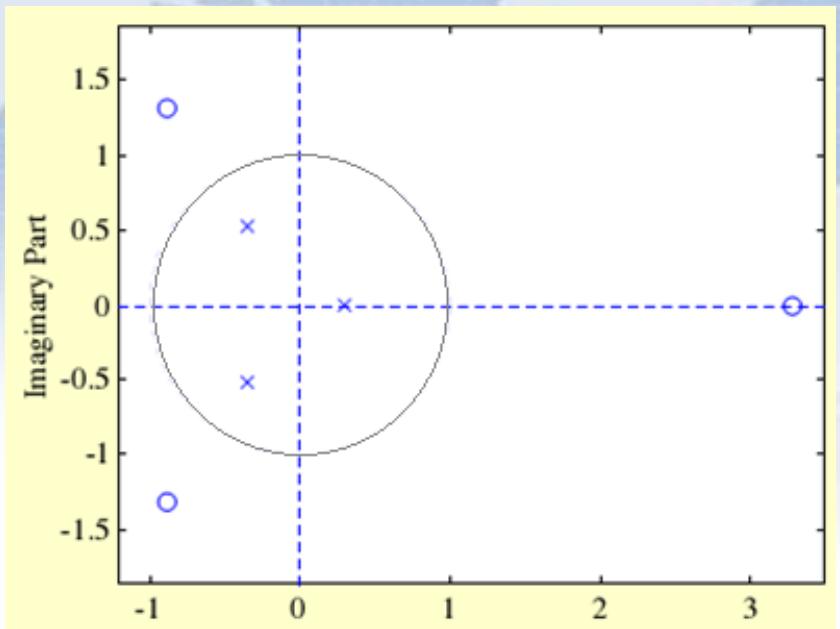
7-1-4 全通传递函数 Allpass Transfer Functions
全通传递函数 Allpass Transfer Function
若稳定因果系统满足
则称
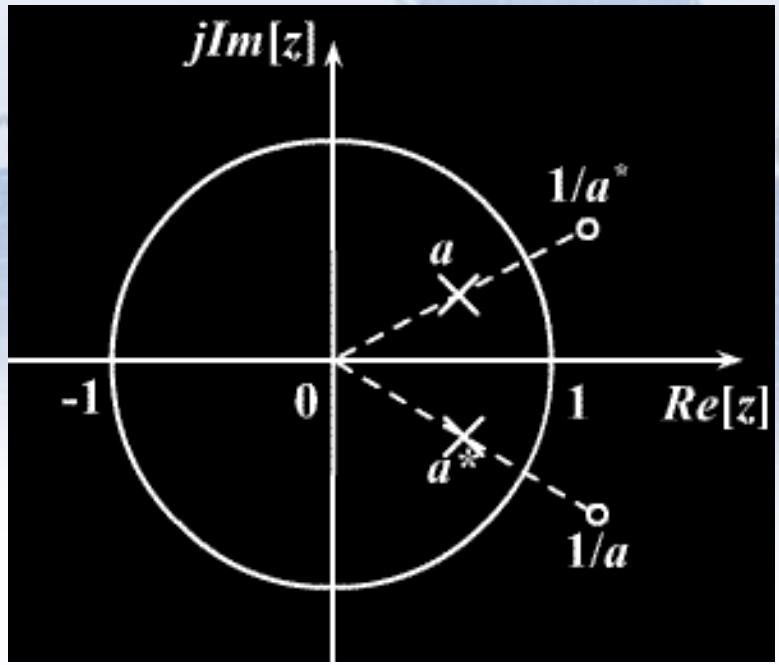
一阶实系数全通系统可写成:
极点在
此时极点在
全通系统的零点与极点满足上述镜像关系。
对于
源教材中把分母多项式的镜像写作
则镜像多项式为:
于是:
镜像多项式对应的零点就是
在单位圆上有:
因此:
更一般地,稳定全通函数满足:
全通系统的幅度恒为 1,但相位通常不是 0。它常用于群延迟均衡 Group-Delay Equalization。
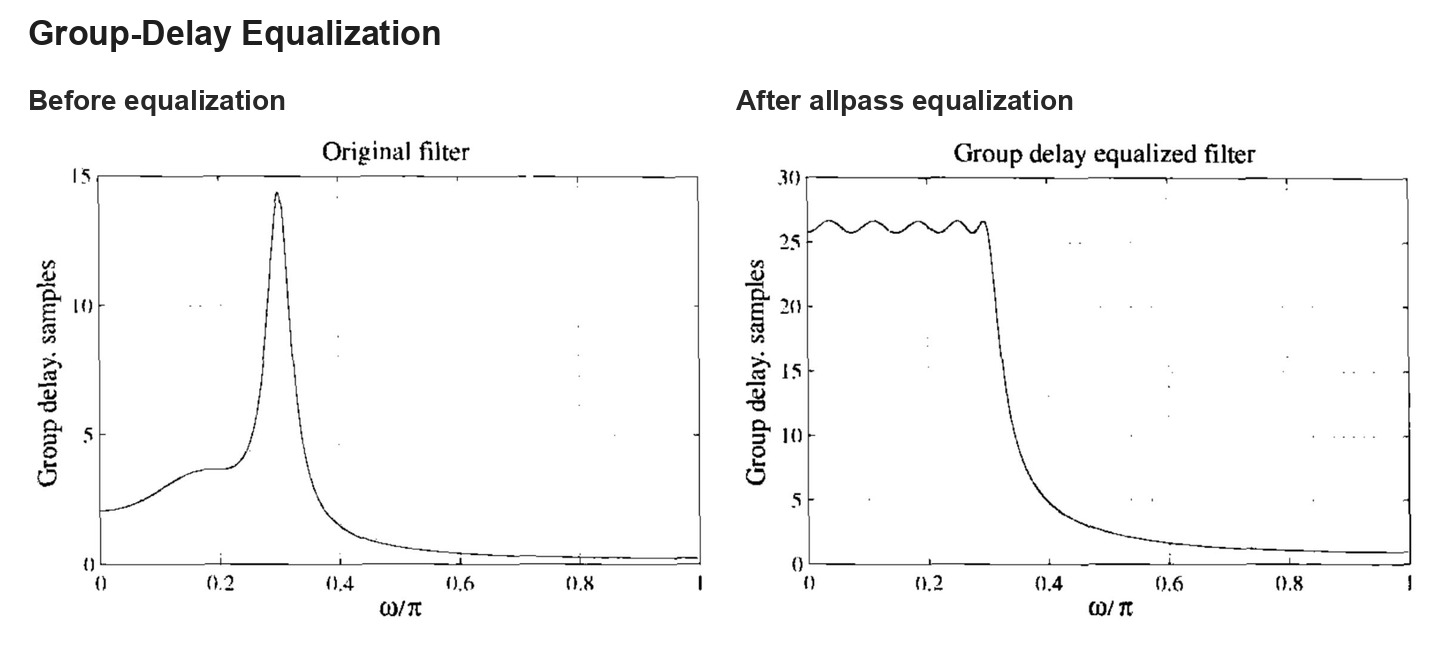
若
群延迟则直接相加:
对于任意稳定因果系统,单位圆外零点对应的因子可分解为全通部分:
其中
7-2 基于相位特性的传递函数分类 Transfer Function Classification Based on Phase Characteristics
7-2-1 相位延迟与波形失真 Phase Delay and Waveform Distortion
对复指数输入
LTI 系统的输出为
其中
若不同频率分量经历不同的相位延迟,叠加后的波形会改变。
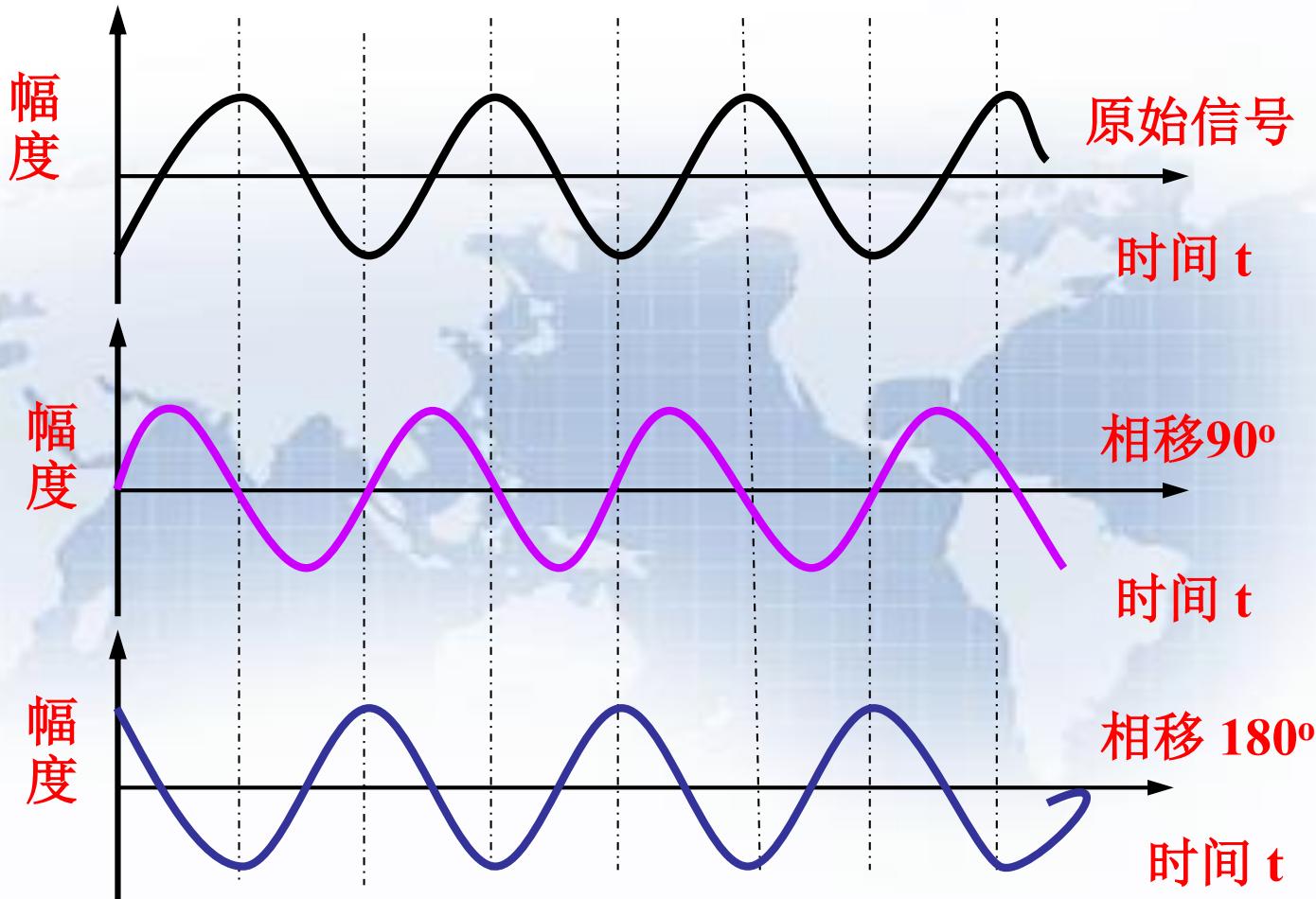
定义相位延迟 Phase Delay:
定义群延迟 Group Delay:
若
则
所有频率分量都延迟
7-2-2 零相位传递函数 Zero-Phase Transfer Functions
零相位传递函数 Zero-Phase Transfer Function
若
且频率响应为实偶函数,则称
零相位系统不会造成相位延迟,典型冲激响应满足偶对称:
这类系统通常是非因果的。实时系统通常不能直接实现零相位滤波,但离线处理中可以用前向-反向滤波构造:
在单位圆上:
该关系对应信号处理软件中的 zero-phase filtering。
对应流程是:
对于实值有限长输入,有:
7-2-3 最小相位与最大相位 Minimum-Phase and Maximum-Phase Transfer Functions
稳定因果 IIR 系统的极点都在单位圆内。零点的位置则决定了相位类型。
最小相位传递函数 Minimum-Phase Transfer Function
若稳定因果系统的所有零点也都在单位圆内,则称其为最小相位传递函数 Minimum-Phase Transfer Function。
最大相位传递函数 Maximum-Phase Transfer Function
若稳定因果系统的所有零点都在单位圆外,则称其为最大相位传递函数 Maximum-Phase Transfer Function。
若零点既有单位圆内的,也有单位圆外的,则称为混合相位 Mixed-Phase。
同一个幅度响应可以对应多个相位响应。常用处理方法是将单位圆外零点反射到单位圆内,并乘上全通因子以保持幅度响应不变。
例如零点
其中
最小相位系统在同幅度响应中具有最小相位延迟,也具有最短的能量集中时间。
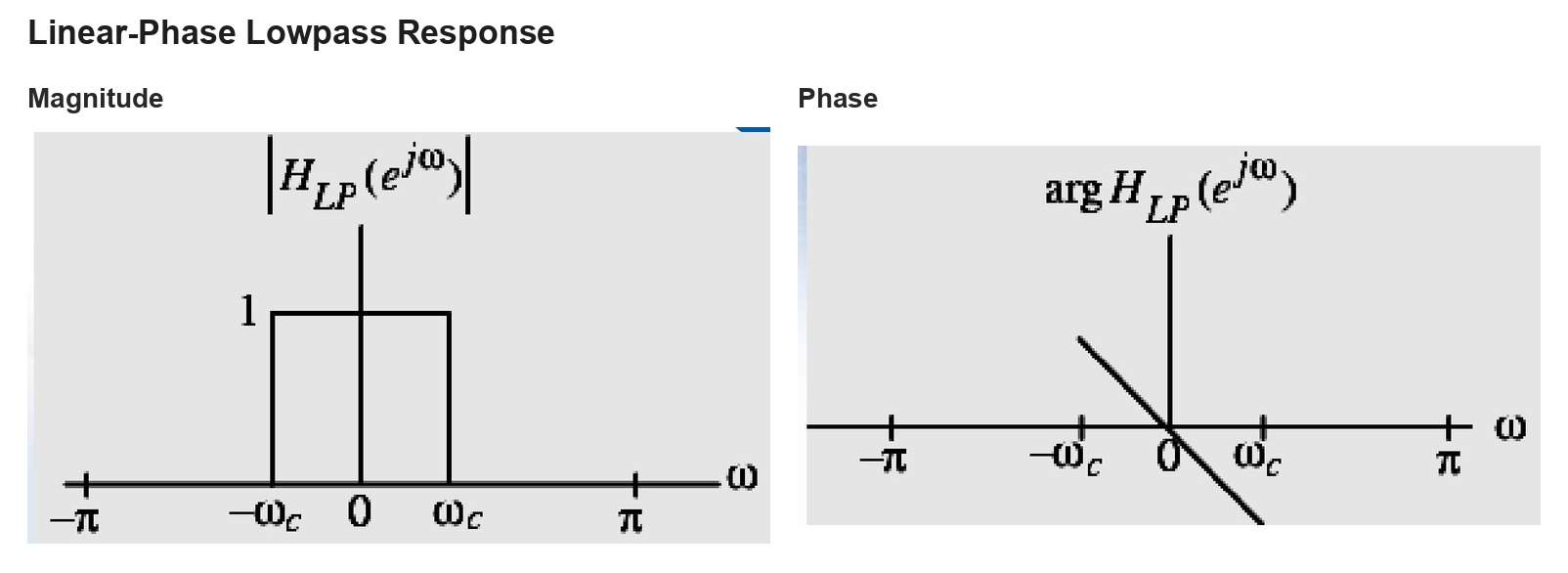
7-2-4 线性相位传递函数 Linear-Phase Transfer Functions
线性相位传递函数 Linear-Phase Transfer Function
若系统相位可以写成
则称该系统具有线性相位 Linear Phase。
线性相位的群延迟为常数:
它仅引入整体延迟,不改变波形中各频率分量的相对位置。
理想低通的冲激响应以
对于理想低通:
若 FIR 长度为
这也是线性相位 FIR 中常见的群延迟。
截断后可写成:
7-3 线性相位 FIR 传递函数类型 Types of Linear-Phase FIR Transfer Functions
7-3-1 对称性与线性相位条件 Symmetry Conditions for Linear Phase
FIR 传递函数为:
若它具有线性相位,则频率响应可写成:
其中
或
第一类称为对称 Symmetric,第二类称为反对称 Antisymmetric。
IMPORTANT
在线性相位 FIR 中,
7-3-2 四类线性相位 FIR Four Types of Linear-Phase FIR
线性相位 FIR 有四种类型。
| 类型 | 对称性 | 阶数 | 长度 | 强制零点 |
|---|---|---|---|---|
| Type I | 偶数 | 奇数 | 无 | |
| Type II | 奇数 | 偶数 | ||
| Type III | 偶数 | 奇数 | ||
| Type IV | 奇数 | 偶数 |
对应的冲激响应形状如下。
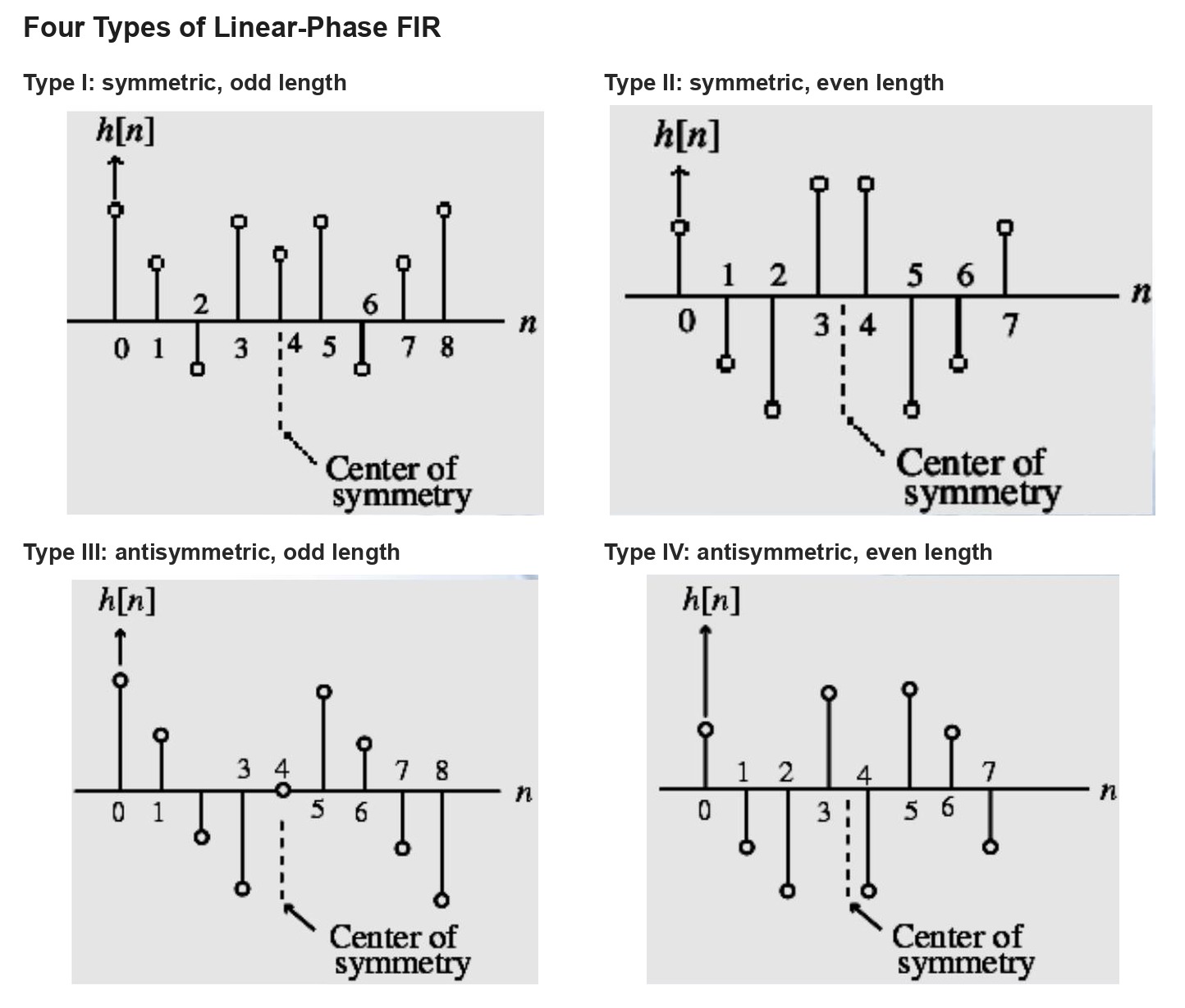
Type I 约束最少,可用于低通、高通、带通和带阻滤波器。Type II 在
进一步,
| 类型 | ||
|---|---|---|
| Type I | 偶数个或无 | 偶数个或无 |
| Type II | 偶数个或无 | 奇数个 |
| Type III | 奇数个 | 奇数个 |
| Type IV | 奇数个 | 偶数个或无 |
四类的实幅度函数可按余弦或正弦项展开:
| 类型 | 实幅度函数形式 |
|---|---|
| Type I | |
| Type II | |
| Type III | |
| Type IV |
反对称情况下,实际频率响应会多出
7-3-3 线性相位 FIR 的零点位置 Zero Locations of Linear-Phase FIR
线性相位 FIR 的零点成组出现。
若
对于实系数 FIR,共轭对称来自实系数;对于线性相位,倒数对称来自
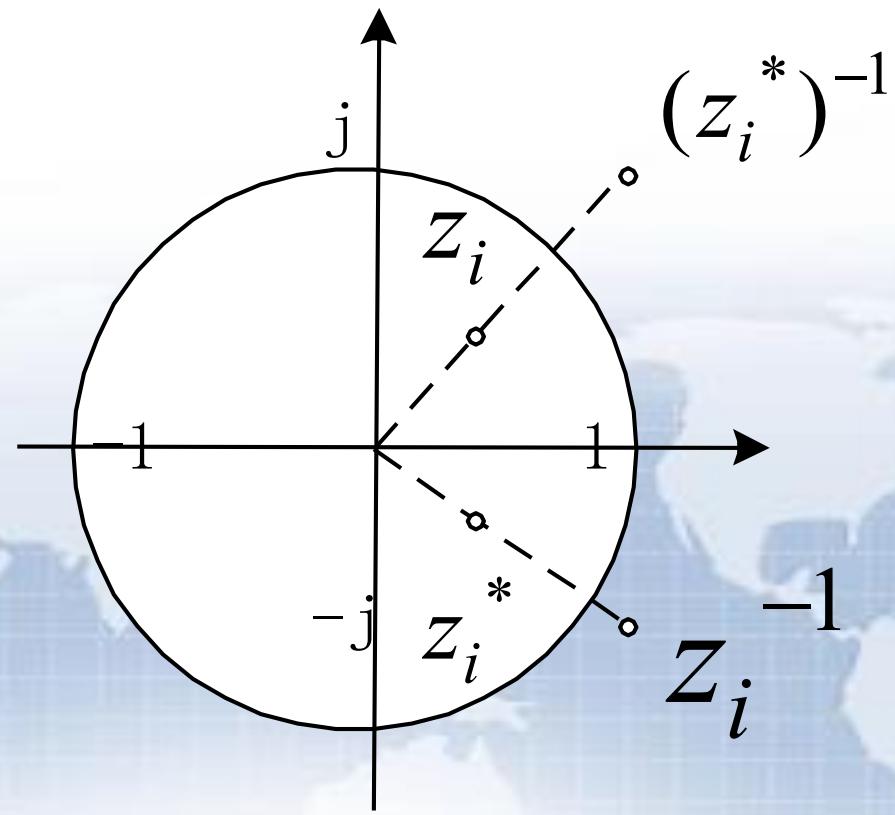
特别地:
- 单位圆上的零点只需要共轭成对;
- 实轴上的零点只需要倒数成对;
PROBLEM L7-E2
某 FIR 滤波器为实系数线性相位系统,已知一个零点为
求必须同时出现的零点。
SOLUTION
实系数给出共轭零点:
线性相位给出倒数零点:
再对倒数零点取共轭:
因此四个零点为:
7-4 简单数字滤波器 Simple Digital Filters
7-4-1 简单 FIR 数字滤波器 Simple FIR Digital Filters
最简单的 FIR 滤波器通常由少量零点配置构成。
1. 两点平均器
其零点在
单位圆上:
因此:
2. 两点差分器
其零点在
单位圆上:
3. 二阶陷波器
若要在
即:
这类 FIR notch 的零点在单位圆上,陷波位置准确,但邻近频率处的过渡通常较缓。
若表达式取正号:
则对应的零点在
4. 梳状滤波器
把两点平均器中的
该形式会在单位圆上产生周期性零点,因此称为梳状滤波器 Comb Filter。
7-4-2 简单 IIR 数字滤波器 Simple IIR Digital Filters
IIR 滤波器通过极点增强某些频率附近的响应。极点越靠近单位圆,响应越尖锐,但稳定裕量越小。
一个简单的一阶低通可写为:
它有一个位于
当
一个简单的一阶高通可写为:
其中
二阶带通可以写作:
二阶带阻可以写作:
这里
源稿给出的带宽关系为:
TIP
FIR 主要通过零点抑制指定频率;IIR 可同时利用极点增强邻近频率响应,因此过渡特性通常更灵活。